
“机器人建造”是当今修建学的抢手话题。自2012年在维也纳举行的第一次Rob|Arch会议以来,仅仅五年的工夫,“机器人建造”在全球范围内以令人难以相信的速度开展着。随着这几年机器人安装的数量简直呈指数增长,如今的“机器人建造”曾经在创意产业中到达了井喷式开展。
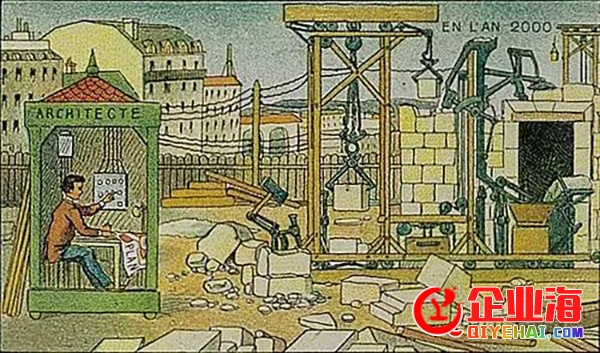
修建师对机器人休息的梦想在上个世纪就已开端出现,最早可溯源到法国艺术家Villemard在1910年发行的明信片中表达的乌托邦式愿景。后来英国修建师Ron Herron在1964年提出“行走城市”的概念。20世纪80、90年代,日本修建行业开端运用高度定制的机器人停止高层修建。



机器人在建造中的运用,最早可追溯到1980年代。绝对于Villemard明信片中显示的高度分化、各司其职的机器人,以及日本运用的单功用高度定制机器人,如今的机器人更倾向于多功用、灵敏性和顺应性。古代数字建造先锋F. Gramazio和M.Kohler对机械臂的理论研讨进一步证明了,机械臂不只仅可以类比人类手臂,还可以执行超出人力范围的建造进程。而飞行机器人更是打破了人类不能飞的局限,尤其是在空中自在操作的才能。

明天如何了解修建和建造
在现代,修建巨匠(Master Builder)是人们对修建师的称谓。罗马修建师维特鲁威在《修建十书》里提到,修建巨匠的任务范围应涵盖工艺和实际,他以为完全依托实际而无视建造工艺的修建师,所追求的是幻影而不是实践。由此可见,传统的修建消费形式对修建师的等待乃是十分通晓建造工艺的人,而这个角色在当今的修建师身上已很难找到踪迹。
修建是基于物质资料的理论学科,其最终完成短少不了真材实料,也不能抛开将资料加工组合的技巧。这决议了选材和制造是设计进程的实质。因此传统形式的修建师无法脱离建造的角色。
而在工业反动后,由于时代对批量消费的等待,更无效率的流水线任务形式需求对分工停止细化和专门化,从而设计师与建造师的角色也渐渐被别离,修建师逐步脱离了把设计“物化/变现”的进程。这种修建巨匠们无法了解的任务形式,在工业反动的时代大背景下却是大受追捧。Joan Soane爵士就是力捧修建师角色地道化的第一人。
现实上,修建巨匠角色的瓦解一度给社会带来激烈的不适。修建巨匠消逝后,两个重生的职业开端盛行:一是只担任设计、但对建造没有真正理解的修建师,二是只担任建造、而对设计没有真正理解的施工承包商。当设计师不具有建造技艺时,设计往往容易变成不理想的、昂贵的、超出预算的“美丽图片”,对人民生活的真正需求也容易缺乏关注。

无论“流水线”形式如何被人诟病,在大规模建立时代,不能够承受修建巨匠形式的消费效率。这就意味着,人类必需在修建巨匠和效率之间找到一条出路。
#p#分页标题#e#而数字建造把修建师重新带回了建造的角色中。数字化加工要求修建师详知整个作品是如何建成的,甚至在设计的最后阶段就开端思索建造。经过机器人对修建师命令准确的传达执行力,修建师又重新掌握了建造的全局。在数字建造的辅佐下,修建师再次无机会扮演一个修建巨匠的角色。但是,古代的修建巨匠无论是在构思方式上还是设计流程上,都和传统的修建巨匠大有不同。
新的设计构思法
数字建造于20世纪上半叶就已开端在欧洲呈现。数字建造之下的任务流程,复杂地描绘就是:人担任设计,计算机将设计笼统化为数字,机器人将数字物化成实体。人的设计转化成命令,而机器人则依据命令去建造。
这个流程的枢纽在于“命令”,命令是一个桥梁,可以精准地将人类的设计意图传达给担任执行的机器人,完成了修建师和建造进程的直接沟通。而在这种任务形式下,修建师的设计实践上也集中于设计消费进程,多于设计图像或模型。
晚期的数字建造采用的是传统的“自上而下”的做法,目的是运用电脑来完成修建师的设计。修建的形状仍然是在一开端就设计,而计算机则是用于协助完成和坚持设计的意图。
新倡议的数字设计方式则是“自下而上”:建造进程所触及的每个成分(外表,资料,机器和模具等)都提供了一系列约束和潜能,例如:模具的选材会招致加工环境的变化,而不同的切削工具也会在模具上发生不同的效果…一切这些参数都为数字物质化提供了普遍的潜能。
这种设计方式使得建形成为设计的源头。它不只仅意味着设计的最后该当充沛思索到建造的局限,更意味着建造进程有很多未被开掘的潜能将被发现。而这些潜能,在“自上而下”的设计中是很难想象失掉,并加以应用的。
机器人加工的建立才能界定了设计的能够性,其优势所在的数字化消费形式启示了一种基于算法的设计谋略。和传统的侧重表达形状的计算机辅佐设计不同,运用机器人技术停止设计所得的模型,不只包括了设计逻辑,还包括数字建造加工的进程。除了表现形状,还可以生成指挥机器人为其执行消费所需的控制数据。

“自下而上”的设计办法,要求修建师对建造工艺十分理解。假如设计师在设计进程中可以即时知晓建造的状况,对改良设计将会十分有利。
设计与建造在修建巨匠的时代,本是一个不时反应、不时改良的静态化互动进程:修建巨匠们一边现场指点施工,一边随时调整战略。工业反动后,这种互动丧失:设计师完成设计后,建造进程才可以开端。设计师需求在不晓得建造进程的状况下完成设计,而建造方也不能参与设计。“流水线”形式的修建消费使设计与建造相互脱节。而数字建造所拥有的反应机制,则将设计与建造互动的能够性重新带到消费进程中。
反应机制

数字建造对复杂的修建元件可完成实地加工,相比于承包给加工商可节省不少开支,更免去了运输的费事。但是,数字建造的门槛也很高:设计师需求懂建造,懂编程,还要懂操作复杂的机器。
2010年,两个奥天时艺术家为了制造出红牛拱的铝拱,他们购置了一台KUKA|prc机械臂,但是却不会运用。他们找到了修建机器人协会。
修建机器人协会的任务人员说:“思索到艺术家们的预算状况,我们最终决议,与其将这单制造外包给协会,不如将机械臂的操作知识教授给他们。在四天之内,我们的任务人员教会他们机械臂的根本操作、Rhino和Grasshopper。虽然他们之前连CAD都不会,却很快对这些软件上手了。四天之后,他们曾经可以用机械臂停止泡沫切割。他们甚至本人尝试去改良加工。”
这个拱总共包括了84块零件,每件零件的外形都不一样。在学会相关操作技艺之后,两位艺术家可以轻松对形状设计停止调整。无论他们更改了拱的高度、宽度或是别的什么参数,都能实时地看到这改动对建造进程发生的影响,然后评价本人的设计能否可行,再前往去持续调整设计。
这样的任务流程,完成了设计与建造的互动。设计影响建造,同时建造又前往来影响设计。在两者的互动中,方案得以不时推进和调整。
#p#分页标题#e#


在艺术家完成泡沫模块切割后,一切的铝元件在德国铸造完成,2012年夏天,红牛拱在奥天时史皮尔堡完成了它的最初集装。可以看出,有了实时反应机制,实践建造进程变得可预测,相关应对战略也可以在设计阶段就制定完善。这让新一代修建巨匠们即便不亲临施工现场,也对建造进程片面掌控。
高迪的圣家堂:陈旧切石法与机械臂的交融
数字建造设计是对消费进程的设计,绝对于传统设计手腕留上去的图纸、模型,数字建造设计留上去还有整个建造完成进程。
位于巴塞罗那的圣家堂(Sagrada Familia)是高迪最有野心的作品。在高迪逝世的时分,这个教堂只完成了20%,它是独一一个未完成就被评为UNESCO世界文明遗产的修建。截至昔日,它已完成了70%。这个交融了高迪团体作风的罗马哥特式教堂极端复杂,工程量浩荡,它的跨时代意义在于,见证了人类工艺程度从人力建造时代开展到数字建造时代。

高迪逝世当前,圣家堂的建立首先由其助理接手,1936年西班牙内战之后,开端由其他修建师担任。数字建造于1989年开端被引入圣家堂工程。在圣家堂当下的建立中,擅长数字建造的新一任总修建师Mark Burry试图去追溯高迪对资料的理论效果,从陈旧的切石法研讨到七个自在维度的机械臂切割。
圣家堂最让人惊叹的是它的石头工艺。石头是人类所熟知的最陈旧的资料之一,但是也是十分耗费人力的工艺。高迪曾亲身测试过不少外地石材和出口石材的承重强度,教堂中心最高的四根柱子将到达172.5米的高度,只要极少石材能胜任这几根柱子的承重使命。

圣家堂一切的柱子都有1:10的宽高比,因此越高的柱子就越粗,一根14米高的柱子就由112块花岗岩组成。每块花岗岩需求停止36小时的加工,由此推算,14米的柱子需求168天完成。但是,在这段漫长的加工工夫内,机械臂所料理的锯轮只要1/3的工夫和岩石接触,其他工夫都用于调整本人的地位以寻觅适宜的切入角度。为了进步加工效率,修建师们决议将现代工匠的切石工艺编入数字加工流程中,让机器人依照古人的智慧停止加工。


数字建造对设计原稿的复原度之高,无愧于高迪的天赋设计。而随着加工工艺的不时改良,建立效率也会越来越高,圣家堂无望在2026年完工。没想到,高迪对石头加工工艺的研讨效果,经过机械臂的理论传承了上去。
#p#分页标题#e#但是更早的修建巨匠们没有这么侥幸。许多珍贵的建立工艺没能赶上数字建立时代就曾经失传。比方佛罗伦萨圣母百花大教堂(于1296-1436年建立)的穹顶,是有史以来最大的砖造穹顶,在事先被视为不能够完成的义务。而关于古代人来说,即便修建师传播上去的手稿解释了局部原理,其详细的架构进程也是个谜。
所幸的是,在数字建造时代,设计师们不再受传统加工程度的限制,设计取得了更多的能够性。而接踵而来的各式各样的建造工艺,都可以被记载入人类建造的大档案库。
(本文经受权转载自微信大众号“全球知识雷锋”ID:gkleifeng2000。“全球知识雷锋”是一个纯原创的修建平台,由清华大学修建学院周榕教师发起,全球五大洲57所名校200余知识雷锋整理提炼,每周提供当代修建最in新知,10分钟洞悉世界修建最前沿讲座精髓。)





